Erstmals Implementierung der Gecomer®-Technologie in einem kollaborativen Roboter
Erstmals Implementierung der Gecomer<sup>®</sup>-Technologie in einem kollaborativen Roboter Quellle: INM, Henrik Ollmann; frei im Zusammenhang mit diesem Inhalt
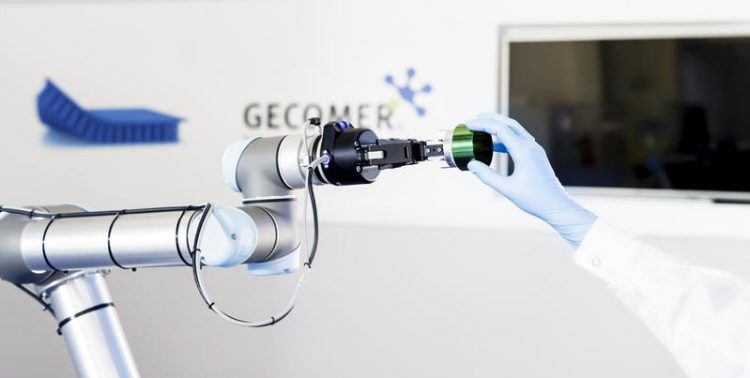
Kollaborative Roboter sind eine neue Generation von Robotern für die direkte Zusammenarbeit mit Menschen, auch ohne Sicherheitsabstand und Schutzkäfige. Wissenschaftler des INM – Leibniz-Institut für Neue Materialien präsentieren nun erstmals einen Cobot, der mit mikrostrukturierten Oberflächen für die Handhabung von Objekten ausgestattet ist.
Da diese Strukturen sehr weich sind und keine scharfen Ecken oder Kanten haben, wird das Verletzungsrisiko für den Menschen weiter reduziert.
Der weiche Cobot ist vom 1. bis 5. April auf der diesjährigen Hannover Messe in Halle 5, Indstrial Supply, in der Surface Technology Area am Stand C54 sehen.
„Unsere innovativen Haftsysteme bestehen aus einem hochelastischen Material. Das Greifen und Ablösen von Objekten wird durch intelligente Oberflächenstrukturen beeinflusst. Dadurch können wir auf spitze Greifer oder Pinzetten verzichten“, sagt Eduard Arzt, wissenschaftlicher Direktor und Leiter des Programmbereichs Funktionelle Mikrostrukturen. Dadurch können Objekte im Produktionsprozess transportiert und abgelegt werden, ohne dass Verletzungen von Menschen oder Schäden an den Objekten entstehen. Die Haftststrukturen eignen sich besonders für empfindliche Teile, wie zum Beispiel Geräte für die Automobil-, Halbleiter- und Displayindustrie.
„Unsere Innovation kann auf alle Prozesse ausgedehnt werden, in denen Cobots eingesetzt werden, selbst in anspruchsvollen Umgebungen, wie zum Beispiel im Vakuum. Wir sind zuversichtlich, dass unsere Gecomer®-Strukturen auch diesen Markt erobern werden“, ergänzt Karsten Moh, Leiter der Gecomer® Applikationen am INM.
Unabhängig davon, ob die Strukturen in Cobots oder in Robotern eingesetzt werden, haben die Forscher des INM nicht nur die Eignung der Gecomere® in verschiedenen industriellen Umgebungen nachgewiesen. Im InnovationsZentrum des INM wurde auch ein fortschrittlicher Rolle-zu-Rolle-Prozess erfolgreich entwickelt, der es ermöglicht, die Haftstrukturen in großen Mengen mit geringen Kosten herzustellen.
Hintergrund
Mit dem geplanten Spin-off-Unternehmen INNOCISE bringt INM die Entwicklungen der Gecomer® Klebstoffstrukturen auf den Markt. INNOCISE wurde für den Leibniz-Gründerpreis 2019 nominiert.
Ihr Experte am INM:
Prof. Dr. Eduard Arzt
Wissenschaftlicher Geschäftsführer und Vorsitzender der Geschäftsführung
Leiter Funktionelle Mikrostrukturen
Tel: 0681-9300-500
eduard.arzt@leibniz-inm.de
Dan Yu, Dirk Beckelmann, Michael Opsölder, Bruno Schäfer, Karsten Moh, René Hensel, Peter William De Oliveira and Eduard Arzt „Roll-to-Roll Manufacturing of Micropatterned Adhesives by Template Compression”; Materials 2019, 12(1), 97; https://doi.org/10.3390/ma12010097
Media Contact
Alle Nachrichten aus der Kategorie: HANNOVER MESSE

_670874-85x60.jpg)


Neueste Beiträge

Neue universelle lichtbasierte Technik zur Kontrolle der Talpolarisation
Ein internationales Forscherteam berichtet in Nature über eine neue Methode, mit der zum ersten Mal die Talpolarisation in zentrosymmetrischen Bulk-Materialien auf eine nicht materialspezifische Weise erreicht wird. Diese „universelle Technik“…

Tumorzellen hebeln das Immunsystem früh aus
Neu entdeckter Mechanismus könnte Krebs-Immuntherapien deutlich verbessern. Tumore verhindern aktiv, dass sich Immunantworten durch sogenannte zytotoxische T-Zellen bilden, die den Krebs bekämpfen könnten. Wie das genau geschieht, beschreiben jetzt erstmals…

Immunzellen in den Startlöchern: „Allzeit bereit“ ist harte Arbeit
Wenn Krankheitserreger in den Körper eindringen, muss das Immunsystem sofort reagieren und eine Infektion verhindern oder eindämmen. Doch wie halten sich unsere Abwehrzellen bereit, wenn kein Angreifer in Sicht ist?…

