Radar für Roboter
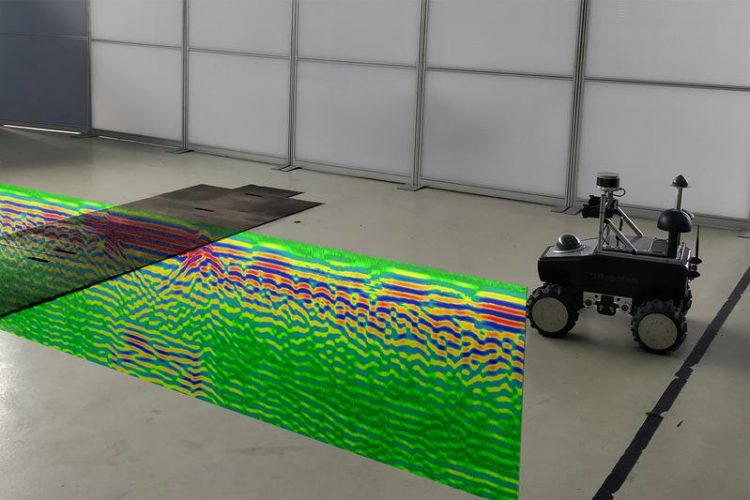
Mobile Roboter und andere Fahrzeuge sollen anhand der Radardaten des Untergrunds navigieren. Bildnachweis: IMN/TU Braunschweig
Um die Position in Fahrzeugen zu bestimmen, kommen aktuell optische Sensoren oder satellitengestützte Technologien zum Einsatz.
Jedoch weisen sie in bestimmten Szenarien besonders im Außenbereich Schwächen in der Genauigkeit und Robustheit auf oder benötigen zusätzliche Installationen. Ein Sensor, der eine Lokalisierung basierend auf den Eigenschaften des Bodens ermöglicht, bietet dagegen eine zuverlässigere Lösung.
Im Rahmen des Forschungsprojekts LoBaBo werden radarbasierte Sensoren und Verfahren zur ein- bzw. zweidimensionalen Erfassung der Struktur des Fahrbahnuntergrundes erforscht. Damit soll eine Kartierung mit ausreichender Auflösung ermöglicht werden.
Basierend auf den gewonnenen Daten soll über geeignete Mapping- und Matching-Verfahren eine eindeutige Ermittlung der Pose (Ort und Orientierung) durchgeführt werden. Dadurch können zukünftig mobile Roboter im Außenbereich ohne zusätzliche Installationen zuverlässig navigieren.
Mappingverfahren dienen der Erstellung von Karten aus den georeferenzierten Bodendaten. Mit den sogenannten Matchingverfahren können Kartendaten und aktuell gemessene Radardaten verarbeitet werden. Mit dem Matching werden Ort und Orientierung eines Fahrzeugs in Echtzeit mit ausreichender Auflösung und Genauigkeit ermittelt.
Die TU Braunschweig entwickelt Lokalisierungsalgorithmen für eine Lokalisierung entlang einer Bahn (1D-Lokalisierung) und auf einer Fläche (2D-Lokalisierung). Dabei wird untersucht, wie die Radardaten vorprozessiert werden müssen und welche Lokalisierungsalgorithmen am besten geeignet sind.
Die Radar-Messungen werden verglichen mit Kartendaten und der Bestimmung der Transformation, also der Änderung der Richtung. Zusätzlich wird ein kontinuierliches und ein diskretes Positionsupdate über die Radartechnik bestimmt. Abschließend soll die Ortsbestimmung mit einem Versuchsträger für Indoor- und Outdoor-Fälle verifizert werden.
Projektdaten:
Das Forschungsprojekt LoBaBo mit einer Laufzeit von drei Jahren (Februar 2020 bis Januar 2023) wird vom Bundesministerium für Bildung und Forschung (BMBF) mit insgesamt 850.000 Euro gefördert; die TU Braunschweig erhält davon anteilig rund 350.000 Euro.
Partner im Verbundprojekt sind die Firma Götting KG in Lehrte (LoBaBo-Koordination), die Firma SF Microwave GmbH aus Braunschweig, eine Ausgründung aus dem Institut für Hochfrequenztechnik der TU Braunschweig (Abteilung Mikrowellentechnik) und das Institut für mobile Maschinen und Nutzfahrzeuge der TU Braunschweig (Leiter Professor Ludger Frerichs) mit der Arbeitsgruppe Automatisierungs- und Robotersysteme (Arbeitsgruppenleitung Jan Schattenberg).
Jan Schattenberg
Technische Universität Braunschweig
Institut für mobile Maschinen und Nutzfahrzeuge
Langer Kamp 19a
38106 Braunschweig
Tel.: 0531 391 7192
E-Mail: j.schattenberg@tu-braunschweig.de
https://www.tu-braunschweig.de/imn
https://magazin.tu-braunschweig.de/pi-post/radar-fuer-roboter/
Media Contact
Alle Nachrichten aus der Kategorie: Informationstechnologie
Neuerungen und Entwicklungen auf den Gebieten der Informations- und Datenverarbeitung sowie der dafür benötigten Hardware finden Sie hier zusammengefasst.
Unter anderem erhalten Sie Informationen aus den Teilbereichen: IT-Dienstleistungen, IT-Architektur, IT-Management und Telekommunikation.




Neueste Beiträge

Das Mikrobiom verändert sich dynamisch und begünstigt wichtige Funktionen für den Wirt
Ein interdisziplinäres Forschungsteam des Kieler SFB 1182 untersucht am Beispiel von Fadenwürmern, welche Prozesse die Zusammensetzung des Mikrobioms in Wirtslebewesen steuern. Alle vielzelligen Lebewesen – von den einfachsten tierischen und…

Wasser im Boden – genaue Daten für Landwirtschaft und Klimaforschung
Die PTB präsentiert auf der Woche der Umwelt, wie sich die Bodenfeuchte mithilfe von Neutronenstrahlung messen lässt. Die Bodenfeuchte hat nicht nur Auswirkungen auf die Landwirtschaft, sondern ist als Teil…

Bioreaktor- und Kryotechnologien für bessere Wirkstofftests mit humanen Zellkulturen
Medizinische Wirkstoffforschung… Viele Neuentwicklungen von medizinischen Wirkstoffen scheitern, weil trotz erfolgreicher Labortests mit Zellkulturen starke Nebenwirkungen bei Probanden auftreten. Dies kann passieren, wenn zum Beispiel die verwendeten Zellen aus tierischem…

