"C-Manipulator" – DFKI entwickelt duales autonomes Unterwassermanipulationssystem
Ziel des Projektes ist es, unter Einsatz aktueller Techniken der Künstlichen Intelligenz und innovativer Robotik-Technologien in den kommenden drei Jahren ein duales autonomes Unterwassermanipulationssystem für Inspektions- und Wartungsaufgaben zu entwickeln. Der „C-Manipulator“ wird in der Lage sein, selbstständig Objekte zu greifen, abzusetzen und Verbindungen zu stecken. Hierfür wird ein Zwei-Arm-System entwickelt, das aus einem Greifer – dem sogenannten Hauptmanipulator – und einem Kameraarm mit gleichzeitiger Beleuchtungsfunktion besteht.
Da Unterwasserfahrzeuge, wie Remotely Operated Vehicles (ROV) und Autonomous Underwater Vehicles (AUV), bislang noch nicht über autonome Manipulatorsysteme verfügen, soll mit dem „C-Manipulator“ ein System entwickelt werden, das an bestehende Unterwasserfahrzeuge adaptiert werden kann. Hierfür gilt es unter anderem, eine allgemeine Software-Schnittstelle aufzubauen, um den „C-Manipulator“ leicht an die existierende Steuerungssoftware der Unterwasserfahrzeuge ankoppeln zu können.
Um die Fähigkeiten des Systems ausgiebig testen und optimieren zu können, ist ein spezieller Unterwasserteststand entwickelt worden, der die verschiedenen Begebenheiten unter Wasser simulieren kann. Dieser Teststand ist in der Lage, sowohl die Bewegungen von Unterwasserfahrzeugen als auch physikalische Störungen durch eine integrierte bewegliche Plattform nachzuahmen. Zusätzlich können verschiedene Wasser- und Lichtverhältnisse damit simuliert werden.
Die Einsatzszenarien für das intelligente Manipulatorsystem sind sehr vielfältig. Es kann einerseits zur Inspektion und Wartung von Unterwassergewerken sowie zur Behebung von Störquellen verwendet werden, andererseits kann es zum Aussetzen und Bergen von wissenschaftlich-technischem Gerät in der Tiefsee eingesetzt werden. Insbesondere soll der „C-Manipulator“ auch Dockingvorgänge und Steckverbindungen im Bereich Energiezuleitung und Datenverkabelung realisieren können.
Pressekontakt DFKI-Labor Bremen:
Franziska Martin
DFKI-Labor Bremen
Robert-Hooke-Str. 5
D-28359 Bremen
Tel.: +49 421-218 64121, Fax: +49 421-218 64150
Email: franziska.martin@dfki.de
Media Contact
Alle Nachrichten aus der Kategorie: Informationstechnologie
Neuerungen und Entwicklungen auf den Gebieten der Informations- und Datenverarbeitung sowie der dafür benötigten Hardware finden Sie hier zusammengefasst.
Unter anderem erhalten Sie Informationen aus den Teilbereichen: IT-Dienstleistungen, IT-Architektur, IT-Management und Telekommunikation.




Neueste Beiträge
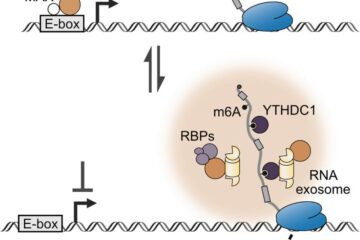
Forschende enthüllen neue Funktion von Onkoproteinen
Forschende der Uni Würzburg haben herausgefunden: Das Onkoprotein MYCN lässt Krebszellen nicht nur stärker wachsen, sondern macht sie auch resistenter gegen Medikamente. Für die Entwicklung neuer Therapien ist das ein…
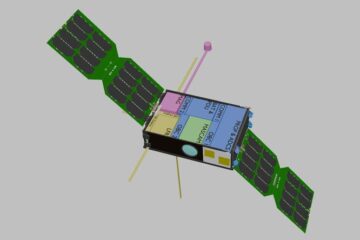
Mit Kleinsatelliten den Asteroiden Apophis erforschen
In fünf Jahren fliegt ein größerer Asteroid sehr nah an der Erde vorbei – eine einmalige Chance, ihn zu erforschen. An der Uni Würzburg werden Konzepte für eine nationale Kleinsatellitenmission…

Zellskelett-Gene regulieren Vernetzung im Säugerhirn
Marburger Forschungsteam beleuchtet, wie Nervenzellen Netzwerke bilden. Ein Molekülpaar zu trennen, hat Auswirkungen auf das Networking im Hirn: So lässt sich zusammenfassen, was eine Marburger Forschungsgruppe jetzt über die Vernetzung…

