Programmierter Multikopter fliegt selbstständig durch die Arktis
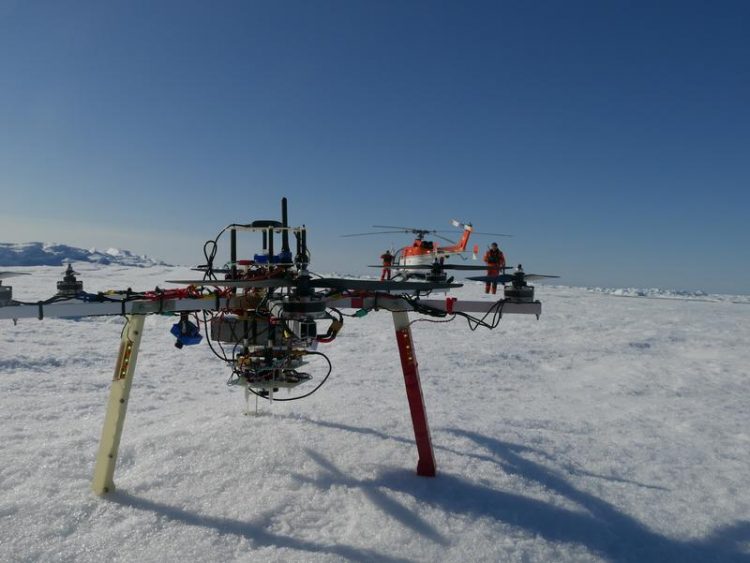
Multikopter-Einsatz in der Arktis Foto: Alfred-Wegener-Institut / Tobias Mikschl
Wie bringt man ein Fluggerät in den Weiten des Arktischen Ozeans ans Ziel, wenn der Kompass keine zuverlässigen Positionsdaten liefert?
Ingenieure an Bord des Forschungseisbrechers Polarstern des Alfred-Wegener-Instituts programmierten einen Multikopter so, dass er trotz Missweisung des Erdmagnetfeldes nahe des Nordpols navigieren kann. Einen ersten erfolgreichen autonomen Testflug nebst Landung feierten die Wissenschaftler kürzlich auf einer Eisscholle.
„Die autonome Navigation stellt in hohen Breiten eine große Herausforderung dar“, sagt Sascha Lehmenhecker, Ingenieur am Alfred-Wegener-Institut, Helmholtz-Zentrum für Polar- und Meeresforschung (AWI). „Die Navigation erfolgt mittels Magnetsensoren. Die Feldlinien des Erdmagnetfelds zeigen jedoch in Pol-Nähe nahezu senkrecht zum Erdboden, so dass eine exakte Navigation schwierig ist. Aus diesem Grund sind kommerzielle Multikopter-Steuerungen für Einsätze in polaren Regionen ungeeignet“, so der Ingenieur.
Gemeinsam mit den beiden Doktoranden Michael Strohmeier und Tobias Mikschl von der Universität Würzburg entwickelt Lehmenhecker die Steuerung sogenannter Multikopter weiter. Diese durch mehrere Propeller angetriebenen, etwa einen halben Meter großen Fluggeräte sollen zukünftig auf Eisschollen abgesetzt werden und nach mehreren Stunden von dort selbstständig zurück zu einem Forschungsschiff fliegen.
Die besondere Aufgabe: Sowohl die Eisscholle als auch das Schiff bewegen sich. Das Schiff ist unterwegs, um andere Forschungsaufgaben wahrzunehmen und Wind, Wellen sowie Strömung verdriften die Eisschollen. Genau diese Richtung und Geschwindigkeit der Drift soll der Multikopter erfassen.
Das Entwickler-Team verfolgt zwei Ansätze, damit die Steuerung des Multikopters die Missweisung in die Positionsbestimmung mit einbezieht. „Zum einen hat der Multikopter über Funk permanenten Kontakt zu einer Bodenstation, die mittels der GPS-Daten des Multikopters die Missweisung berechnet. Der Multikopter schickt also seine GPS-Position per Funk an eine Bodenstation und diese schickt ihm anschließend die entsprechenden neu berechneten Koordinaten“, erklärt Sascha Lehmenhecker.
„Der zweite Ansatz: Wir berechnen mittels zweier angebrachter GPS-Empfängern die tatsächliche Veränderung der Position des Fluggerätes. Das ist der bessere aber auch viel komplexere Ansatz, mit dem wir noch am Anfang der Entwicklungsarbeit stehen“, ordnet der AWI-Ingenieur ein.
Ein erster Test auf einer Eisscholle in der arktischen Framstraße (79° nördlicher Breite) hat kürzlich prima funktioniert: Das Multikopter-Team hatte sich mitsamt Fluggerät auf einer Scholle aussetzen lassen. Abseits magnetischer Störungen durch Elektromotoren an Bord der Polarstern haben sie das Fluggerät manuell etwa drei Kilometer bis zur Sichtgrenze geflogen. Dort starteten sie das autonome Rückflugprogramm, der Multikopter kehrte zu den vorprogrammierten Koordinaten zurück und landete selbständig.
Die Idee für diese Entwicklung kam Sascha Lehmenhecker und seinen Kollegen aus der AWI-Tiefseegruppe beim Einsatz sensibler Geräte unter dem Eis. Ein Beispiel dafür ist das torpedoförmige autonome Unterwasserfahrzeug (AUV) der AWI-Tiefseegruppe namens „Paul“. Er erkundet den Ozean unter dem Meereis. „Zur optimalen Planung seiner Tauchgänge ist es wichtig, auf genaue Informationen zur Bewegung des Meereises zurückgreifen zu können“, erläutert Sascha Lehmenhecker.
Bisher wurden dafür sogenannte „Ice Tracker“ mit Hilfe eines Schlauchbootes oder eines Helikopters auf einer Scholle ausgebracht – ein aufwendiges und zeitraubendes Verfahren. Außerdem versuchen die Expeditionsteilnehmer wenn möglich zu vermeiden, die sichere Polarstern zu verlassen. Schließlich herrscht eine Wassertemperatur um die 0 Grad Celsius, driftende scharfkantige Eisschollen und Eisbären stellen zusätzliche Risiken dar, die möglichst minimiert werden.
Bereits während einer Expedition im Jahr 2012 hat die Tiefseegruppe erstmals einen am AWI entwickelten Multikopter eingesetzt. Dieser landete ferngesteuert auf dem Eis, stellte seine Position per GPS fest und übertrug sie an das Forschungsschiff, von dem aus Pauls Tauchgang beaufsichtigt wurde. Im Rahmen der AUV-Tauchgänge übernahm der Multikopter somit eine Navigationsaufgabe zur Unterstützung des Unterwassergeräts.
Nach Abschluss der Tauchgänge musste sich das Schiff der Position des Multikopters annähern: Ein Pilot musste das Gerät per Fernsteuerung zurück zum Schiff fliegen, was nur im Sichtbereich möglich war. „Die aktuelle Weiterentwicklung vergrößert den Aktionsradius unserer Flugroboter von Sichtweite auf bis zu zehn Kilometer“, freut sich Sascha Lehmenhecker über den erfolgreichen Test, der Teil der Helmholtz-Allianz Robotische Exploration unter Extrembedingungen (ROBEX) ist.
Hinweise für Redaktionen:
In der Pressestelle des Alfred-Wegener-Instituts steht Ihnen Folke Mehrtens für Rückfragen gern zur Verfügung (Tel. 0471 4831-2007; E-Mail: medien(at)awi.de).
Druckbare Bilder finden Sie unter http://www.awi.de/ueber-uns/service/presse.html.
Das Alfred-Wegener-Institut forscht in der Arktis, Antarktis und den Ozeanen der gemäßigten sowie hohen Breiten. Es koordiniert die Polarforschung in Deutschland und stellt wichtige Infrastruktur wie den Forschungseisbrecher Polarstern und Stationen in der Arktis und Antarktis für die internationale Wissenschaft zur Verfügung. Das Alfred-Wegener-Institut ist eines der 18 Forschungszentren der Helmholtz-Gemeinschaft, der größten Wissenschaftsorganisation Deutschlands.
http://www.awi.de/ueber-uns/service/presse/pressemeldung/programmierter-multikop…
Pressemitteilung auf AWI-Homepage
http://www.robex-allianz.de/ ROBEX Homepage
Media Contact
Alle Nachrichten aus der Kategorie: Geowissenschaften
Die Geowissenschaften befassen sich grundlegend mit der Erde und spielen eine tragende Rolle für die Energieversorgung wie die allg. Rohstoffversorgung.
Zu den Geowissenschaften gesellen sich Fächer wie Geologie, Geographie, Geoinformatik, Paläontologie, Mineralogie, Petrographie, Kristallographie, Geophysik, Geodäsie, Glaziologie, Kartographie, Photogrammetrie, Meteorologie und Seismologie, Frühwarnsysteme, Erdbebenforschung und Polarforschung.




Neueste Beiträge

Diamantstaub leuchtet hell in Magnetresonanztomographie
Mögliche Alternative zum weit verbreiteten Kontrastmittel Gadolinium. Eine unerwartete Entdeckung machte eine Wissenschaftlerin des Max-Planck-Instituts für Intelligente Systeme in Stuttgart: Nanometerkleine Diamantpartikel, die eigentlich für einen ganz anderen Zweck bestimmt…

Neue Spule für 7-Tesla MRT | Kopf und Hals gleichzeitig darstellen
Die Magnetresonanztomographie (MRT) ermöglicht detaillierte Einblicke in den Körper. Vor allem die Ultrahochfeld-Bildgebung mit Magnetfeldstärken von 7 Tesla und höher macht feinste anatomische Strukturen und funktionelle Prozesse sichtbar. Doch alleine…

Hybrid-Energiespeichersystem für moderne Energienetze
Projekt HyFlow: Leistungsfähiges, nachhaltiges und kostengünstiges Hybrid-Energiespeichersystem für moderne Energienetze. In drei Jahren Forschungsarbeit hat das Konsortium des EU-Projekts HyFlow ein extrem leistungsfähiges, nachhaltiges und kostengünstiges Hybrid-Energiespeichersystem entwickelt, das einen…

