Roboterarme kinderleicht steuern

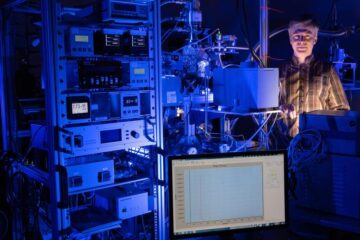
Der Roboterarm lässt sich über ein Eingabegerät lenken. Bewegt sich die Hand mit dem Gerät, so ahmt der Roboter die Bewegung nach. (© Fraunhofer IPA)<br>
Einen Ball zu fangen, dürfte für die meisten Menschen kein Problem sein. Einen Roboterarm mit einem daran befestigten Fangkorb einen Ball fangen zu lassen, ist dagegen ziemlich knifflig. Wie knifflig das sein kann – oder ob vielleicht doch einfacher als gedacht geht – das können die Besucher auf der Messe Sensor+Test in Nürnberg herausfinden.
Auf dem Fraunhofer-Stand 202 in Halle 12 zeigen die Forscher einen Industrieroboterarm mit sechs Gelenken, an dessen Ende sich der Fangkorb befindet. Die Besucher lenken den Arm über ein Eingabegerät, das sie in der Hand halten: Bewegen sie ihre Hand mit dem Gerät, ahmt der Roboter die Bewegung nach. »In dem Eingabegerät befinden sich verschiedene Bewegungssensoren, auch Inertialsensoren genannt«, sagt Bernhard Kleiner, Projektleiter am Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA in Stuttgart. Die mikroelektromechanischen Systeme an sich sind kostengünstig. Die Entwicklungsarbeit der Wissenschaftler liegt in dem Zusammenspiel dieser Sensoren. »Wir haben spezielle Algorithmen entwickelt: Sie fusionieren die Daten der einzelnen Sensoren und ermitteln daraus ein Bewegungsmuster. Wir können also Bewegungen frei im Raum detektieren«, fasst Kleiner zusammen.
Was auf der Messe zunächst wie Spielerei aussieht, bietet zahlreiche Vorteile in der industriellen Fertigung und bei logistischen Prozessen. So könnte das System beispielsweise die Programmierung von Industrierobotern vereinfachen. Bisher nutzt man ein Lasertrackingsystem, bei dem der Mitarbeiter die Bewegung mit einen Stab vormacht, auf dem sich ein weißer Markierungspunkt befindet. Ein Laserstrahl wird an diesem Punkt reflektiert und die Bewegung anhand des reflektierten Lichts dokumentiert. Das System einzurichten und zu kalibrieren ist jedoch sehr zeitaufwändig. Mit dem neuen Eingabegerät soll diese Vorbereitung künftig entfallen – der Mitarbeiter nimmt sich einfach das Gerät und zeigt dem Roboter, was er machen soll.
Auch in der Medizin gibt es zahlreiche Anwendungen für das System. Ein Beispiel ist die Ganganalyse. Bisher filmen Kameras den Patienten, der mehrfach eine bestimmte Strecke auf und ab geht und dokumentieren den Gang exakt. Die Aufnahmen verraten den Ärzten etwa, wie die Gelenke während des Gehens stehen oder ob sich eine Fehlstellung des Knies durch Therapien wie Krankengymnastik gebessert hat. Die Kamerainstallation ist jedoch aufwändig, zudem ist der Patient an eine feste Laufstrecke gebunden. Das neue Sensorsystem könnte dieses Prozedere künftig vereinfachen: Am Oberschenkel des Kranken befestigt, misst es die Bewegungsabläufe und Gangmuster – ohne den Patienten an eine feste Laufstrecke zu binden. »Mit dem inertialen Sensorsystem erfolgt die Ganganalyse referenzlos, ein aufwändiges Kamerasystem ist nicht notwendig«, erläutert Kleiner. In einem weiteren Projekt arbeiten die Forscher bereits daran, die Gangmuster des Patienten mit solchen zu vergleichen, die bei Krankheiten wie Parkinson auftreten.
Ein weiteres Anwendungsbeispiel aus der Medizin ist die Steuerung aktiver Prothesen, in denen sich mehrere kleine Aktuatoren befinden. Bewegt sich der Patient, bewegt sich auch die Prothese entsprechend – so kann eine Beinprothese beim Gehen den Fuß abrollen. Der Sensor könnte auch hier, am Oberschenkel des Patienten befestigt, die Bewegung analysieren und so dabei helfen, die Motoren der Prothese zu regeln. Momentan arbeiten die Forscher daran, das inertiale Sensorsystem mit einem Elektromyographie-Sensor zu kombinieren, kurz EMG-Sensor. Das Prinzip der Elektromyographie: Spannt sich ein Muskel an, entsteht eine elektrische Spannung, die der Sensor über eine Elektrode misst. Legt man den Sensor auf den Muskel des Patienten, der etwa den Fuß hochheben würde, registriert der Sensor, wenn der Patient diesen Muskel anspannt – der Prothesenfuß hebt sich. Zwar gibt es solche EMG-Sensoren bereits, sie sind jedoch schwer zu platzieren. »Während übliche EMG-Sensoren aus einer einzigen Elektrode bestehen, die exakt auf dem Muskel angebracht werden muss, besteht unser System aus vielen kleinen Elektroden, die auf einer Fläche angebracht sind. So können wir Muskelbewegungen sehr viel zuverlässiger wahrnehmen«, sagt Kleiner.
Media Contact
Weitere Informationen:
http://www.fraunhofer.de/presse/presseinformationen/2010-2011/17/roboterarm.jspAlle Nachrichten aus der Kategorie: Messenachrichten




Neueste Beiträge

Ideen für die Zukunft
TU Berlin präsentiert sich vom 22. bis 26. April 2024 mit neun Projekten auf der Hannover Messe 2024. Die HANNOVER MESSE gilt als die Weltleitmesse der Industrie. Ihr diesjähriger Schwerpunkt…
Peptide auf interstellarem Eis
Dass einfache Peptide auf kosmischen Staubkörnern entstehen können, wurde vom Forschungsteam um Dr. Serge Krasnokutski vom Astrophysikalischen Labor des Max-Planck-Instituts für Astronomie an der Universität Jena bereits gezeigt. Bisher ging…
Wasserstoff-Produktion in der heimischen Garage
Forschungsteam der Frankfurt UAS entwickelt Prototyp für Privathaushalte: Förderzusage vom Land Hessen für 2. Projektphase. Wasserstoff als Energieträger der Zukunft ist nicht frei verfügbar, sondern muss aufwendig hergestellt werden. Das…

