Flexibler Sauggreifer
Die Erfindung betrifft einen flexiblen Sauggreifer für
Industrieroboter mit drei Fingern, die jeweils über zwei elektrische Linearantriebe verstellt werden können sowie eine Software zur Ansteuerung des Greifers. Der Flexible Sauggreifer ist durch 6 Freiheitsgrade optimal verstellbar. Dadurch lassen sich die unterschiedlichsten Bauteile mit Freiformgeometrien mit nur einem Greifer handhaben. Die jeweils notwendige Einstellung kann dabei automatisch über die Software aus CAD-Daten berechnet werden (SPS = Speicherprogrammierbare Steuerung).
Weitere Informationen: PDF
PROvendis GmbH
Tel.: +49 (0)208/94105 0
Ansprechpartner
Dipl.-Ing. Alfred Schillert
Media Contact
Alle Nachrichten aus der Kategorie: Technologieangebote
Neueste Beiträge

Entscheidender Durchbruch für die Batterieproduktion
Energie speichern und nutzen mit innovativen Schwefelkathoden. HU-Forschungsteam entwickelt Grundlagen für nachhaltige Batterietechnologie. Elektromobilität und portable elektronische Geräte wie Laptop und Handy sind ohne die Verwendung von Lithium-Ionen-Batterien undenkbar. Das…

Wenn Immunzellen den Körper bewegungsunfähig machen
Weltweit erste Therapie der systemischen Sklerose mit einer onkologischen Immuntherapie am LMU Klinikum München. Es ist ein durchaus spektakulärer Fall: Nach einem mehrwöchigen Behandlungszyklus mit einem immuntherapeutischen Krebsmedikament hat ein…
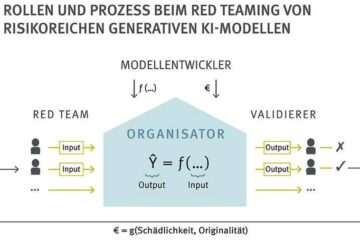
So soll risikoreiche generative KI geprüft werden
Die beschlossene KI-Verordnung der EU sieht vor, dass Künstliche-Intelligenz-Modelle (KI) „für allgemeine Zwecke mit systemischem Risiko“ besonders strikt überprüft werden. In diese Modellkategorie gehören auch populäre generative KI-Modelle wie GPT4…

