Gewicht von Robomotion-Greifer um 60 Prozent reduziert
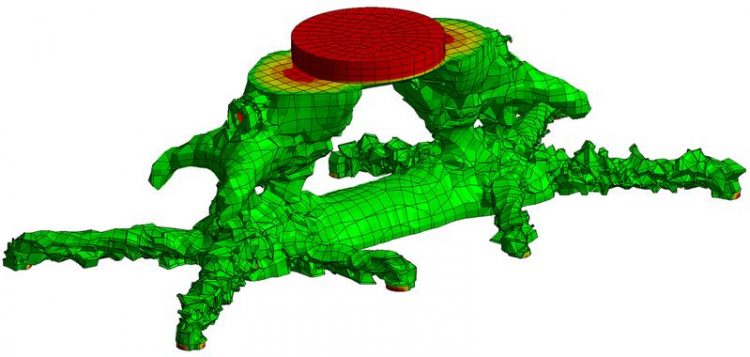
Ergebnis der Topologieoptimierung Fraunhofer IPA/Robomotion GmbH
Vakuumgreifer sind in der Verpackungsindustrie besonders beliebt. Sie lassen sich schnell an einen Roboterarm anschließen und können Produkte mit glatter Oberfläche sicher transportieren. Mini-Salamis, Bonbons oder Schokoriegel legen sie mühelos aufs Band oder in Kartons.
Damit der Roboter möglichst viel Gewicht aufnehmen kann, sollte der Greifer so leicht wie möglich sein. Dem Fraunhofer IPA ist es gelungen, einen Greifer der Robomotion GmbH mit Topologieoptimierung zu überarbeiten und 60 Prozent Gewicht einzusparen.
Die meisten Roboter verfügen nur über eine geringe Traglast. Bringt der Greifer schon ein hohes Eigengewicht mit, kann der Roboter weniger beziehungsweise keine schweren Produkte aufnehmen. Ein leichteres Bauteil lässt sich außerdem besser beschleunigen, was sich positiv auf den Energieverbrauch auswirkt.
Neben der Gewichtsreduzierung wollten die IPA-Wissenschaftler im Projekt mit Robomotion auch den Konfigurationsaufwand verbessern. »Beim ursprünglichen Greifer musste man viele Schrauben aufdrehen, um ihn zu wechseln. Wir wollten deshalb einen neuen Adapter integrieren, den man mit nur einem Griff ab- und anmontieren kann«, informiert Projektleiter Jochen Burkhardt vom Fraunhofer IPA.
Positiver Nebeneffekt: Weniger Materialkosten
Für die Topologieoptimierung haben die IPA-Experten mit der Finiten-Elemente-Methode (FEM) die Belastungen am Bauteil analysiert. Dabei haben sie schnell erkannt, welche Bereiche nur gering belastet werden und verschmälert werden können. Zwingend benötigte Elemente wie die Luft- und Vakuumkanäle und die Anschlussplatte für die Roboteranflanschung haben sie als Non-Design-Areas markiert und vom Optimierungsprozess ausgeschlossen.
Auf diese Weise haben sie herausgefunden, dass bei der Anschlussstelle des Greifers – dem Flansch – und den Strömungskanälen Aussparungen vorgenommen werden können. Nachdem ein optimierter Designvorschlag auskonstruiert war, führten die Wissenschaftler eine zweite FEM-Analyse durch.
»Dabei hat sich gezeigt, dass die Spannungen und Verformungen trotz Materialeinsparungen konstant bleiben«, freut sich Burkhardt. Das neue Greifer-Modell wurde mit 3D-Druck realisiert. Als Baustoff diente, wie auch schon beim Original, das leichte und trotzdem stabile Polyamid (P12). »Mit der neuen Konstruktion sparen wir sogar noch Materialkosten«, weiß Burkhardt.
Neuer Flansch für schnellere Konfiguration
Der neue Greifer wiegt nun mit zirka 150 Gramm 60 Prozent weniger als das Vorgängermodell. Mit der Ersparnis war es den Wissenschaftlern möglich, einen etwas schwereren Schnellwechseladapter zu integrieren. »Jetzt muss man nur noch eine Klemmung öffnen, um den Greifer am Roboterarm zu konfigurieren«, informiert Burkhardt. Die Erkenntnisse der Topologieoptimierung kann Robomotion auch für weitere Greifer verwenden.
»Im Projekt wurde ein achtfacher Greifer optimiert, die Maßnahmen lassen sich aber auch bei einem vierfachen Greifer des Unternehmens realisieren«, so Burkhardt. Seiner Meinung nach zeige das Projekt mit Robomotion, dass sich mit Topologieoptimierung selbst bei sehr leichten Bauteilen noch etwas herausholen lässt. »Wir haben einen sehr guten Greifer noch besser gemacht«, meint der Experte.
Pressekommunikation
Ramona Hönl | Telefon +49 711 970-1638 | ramona.hoenl@ipa.fraunhofer.de
Fachlicher Ansprechpartner
Jochen Burkhardt | Telefon +49 711 970-1550 | jochen.burkhardt@ipa.fraunhofer.de
http://www.ipa.fraunhofer.de/de/presse/presseinformationen/Topologieoptimierung_…
Media Contact
Alle Nachrichten aus der Kategorie: Maschinenbau
Der Maschinenbau ist einer der führenden Industriezweige Deutschlands. Im Maschinenbau haben sich inzwischen eigenständige Studiengänge wie Produktion und Logistik, Verfahrenstechnik, Fahrzeugtechnik, Fertigungstechnik, Luft- und Raumfahrttechnik und andere etabliert.
Der innovations-report bietet Ihnen interessante Berichte und Artikel, unter anderem zu den Teilbereichen: Automatisierungstechnik, Bewegungstechnik, Antriebstechnik, Energietechnik, Fördertechnik, Kunststofftechnik, Leichtbau, Lagertechnik, Messtechnik, Werkzeugmaschinen, Regelungs- und Steuertechnik.




Neueste Beiträge

Neue universelle lichtbasierte Technik zur Kontrolle der Talpolarisation
Ein internationales Forscherteam berichtet in Nature über eine neue Methode, mit der zum ersten Mal die Talpolarisation in zentrosymmetrischen Bulk-Materialien auf eine nicht materialspezifische Weise erreicht wird. Diese „universelle Technik“…

Tumorzellen hebeln das Immunsystem früh aus
Neu entdeckter Mechanismus könnte Krebs-Immuntherapien deutlich verbessern. Tumore verhindern aktiv, dass sich Immunantworten durch sogenannte zytotoxische T-Zellen bilden, die den Krebs bekämpfen könnten. Wie das genau geschieht, beschreiben jetzt erstmals…

Immunzellen in den Startlöchern: „Allzeit bereit“ ist harte Arbeit
Wenn Krankheitserreger in den Körper eindringen, muss das Immunsystem sofort reagieren und eine Infektion verhindern oder eindämmen. Doch wie halten sich unsere Abwehrzellen bereit, wenn kein Angreifer in Sicht ist?…

