Nieten, schrauben, kleben im Flugzeugbau: Smarte Mensch-Roboter-Teams meistern agile Produktion

Maschinen können zukünftig Fertigungsaufgaben übernehmen, die für den Menschen belastend sind.
Im Mensch-Roboter-Team organisieren sich die Roboter „um den Menschen herum“, der somit Freiheitsgrade und Flexibilität bei der Erledigung seines Arbeitsplanes gewinnt. Der Mensch übernimmt nur die Aufgaben, die höhere kognitive oder sensomotorische Fähigkeiten erfordern, wie z.B. Feinjustage und Qualitätskontrolle, unterstützt wird er mittels HoloLens-Brille durch eine AR-Anwendung.
Dem Demonstrator liegt eine kontrollierbare dienstebasierte Infrastruktur für Industrie 4.0-Produktionssysteme zugrunde, die durch eine ressourcen-orientierte Architektur (ROA) ergänzt und erweitert wird. Die ROA ermöglicht die Bereitstellung verteilter Komponenten und Sensorik sowie den Zugriff darauf. Bestehende und neue Komponenten können unter Verwendung von Web Standards eingebunden werden.
Über die Architektur stellen die eingebundenen Komponenten einerseits Informationen – Zustände, Sensordaten, etc. – zur Verfügung (als „Provider“), und greifen andererseits auf Informationen anderer Komponenten zu (als „Consumer“). So lassen sich mobile und stationäre Robotik, Sensorsysteme, Umgebungserfassung und Trackingsysteme miteinander verbinden. Darauf aufbauende neue Dienste können als „Prosumer“ neue Fähigkeiten bereitstellen.
Semantisch angereichert können auch bestehende Systeme gekapselt und auf homogene Weise angesprochen werden, was eine schnelle Austauschbarkeit gewährleistet. Die dezentrale Bereitstellung erlaubt den lokalen Transfer von Informationen ohne Vermittlung einer zentralen Steuerungsinstanz.
So können die Werker jederzeit z.B. über Statusänderungen von Werkstücken und Arbeitsabläufen informiert werden und Sensorinformationen aus unterschiedlichen Quellen gebündelt und aufbereitet abrufen. Die ROA unterstützt so die dynamische und wandlungsfähige Umsetzung von Mensch-Roboter Kollaboration (MRK).
Ebenfalls in Hybr-iT erforscht und entwickelt werden Ansätze zur 3D-Simulation von MRK-Szenarien. Sie dienen der virtuellen Absicherung der geplanten Arbeitsabläufe und gewährleisten den nahtlosen Übergang von der Planung zur Inbetriebnahme. Dazu werden die Arbeitsabläufe modelliert und das Zusammenspiel von Werker und Roboteraktionen im Vorfeld auf ihre Praxistauglichkeit überprüft.
Presse-Kontakt:
Heike Leonhard
Unternehmenskommunikation DFKI Saarbrücken
E-Mail: Heike.Leonhard@dfki.de
Tel.: +49 681 85775 5390
mobil: +49 174 3076888
Dr. Anselm Blocher
Forschungsbereich Kognitive Assistenzsysteme
E-Mail: Anselm.Blocher@dfki.de
Tel.: +49 681 85775 5262
Media Contact
Alle Nachrichten aus der Kategorie: HANNOVER MESSE

_670874-85x60.jpg)


Neueste Beiträge

Ideen für die Zukunft
TU Berlin präsentiert sich vom 22. bis 26. April 2024 mit neun Projekten auf der Hannover Messe 2024. Die HANNOVER MESSE gilt als die Weltleitmesse der Industrie. Ihr diesjähriger Schwerpunkt…
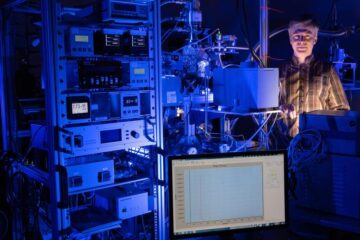
Peptide auf interstellarem Eis
Dass einfache Peptide auf kosmischen Staubkörnern entstehen können, wurde vom Forschungsteam um Dr. Serge Krasnokutski vom Astrophysikalischen Labor des Max-Planck-Instituts für Astronomie an der Universität Jena bereits gezeigt. Bisher ging…
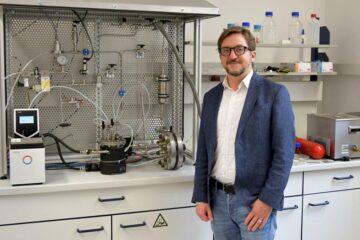
Wasserstoff-Produktion in der heimischen Garage
Forschungsteam der Frankfurt UAS entwickelt Prototyp für Privathaushalte: Förderzusage vom Land Hessen für 2. Projektphase. Wasserstoff als Energieträger der Zukunft ist nicht frei verfügbar, sondern muss aufwendig hergestellt werden. Das…

