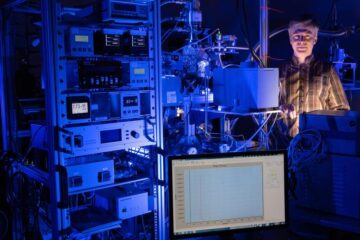
Verbesserte Sicherheit für Serviceroboter

Der mobile Serviceroboter »Care-O-bot® 4« wurde im Forschungsprojekt S3 mit neuen Armen und Sensorik sowie verbesserten Erkennungsalgorithmen für den sicheren Einsatz in öffentlichen Umgebungen, wie z.B. Pflegeheimen, ausgestattet.
Bild: Florenz Graf / Fraunhofer IPA
Im Forschungsprojekt S³, das am 31. Oktober endete, haben Forscher des Fraunhofer IPA gemeinsam mit Projektpartnern neue Sicherheitstechnologien und Erkennungsalgorithmen für Serviceroboter entwickelt. Diese testeten sie erfolgreich auf dem Serviceroboter »Care-O-bot® 4« in einer beispielhaften Anwendung im Pflegeheim.
Die Sicherheit einer Anwendung mit Servicerobotern ist unabdingbar und mitunter noch herausfordernd. Im Gegensatz zu Industrierobotern bewegen sich mobile Serviceroboter in dynamischen Umgebungen und oft unter Menschen, die nicht mit ihnen vertraut sind. Im Umfeld der stationären Pflege können sie zudem auf besonders schutzbedürftige Personen treffen. Im Forschungsprojekt S³ sind deshalb Technologien entstanden, die die Wahrnehmung von Objekten und der Umgebung sowie die Handhabungsfähigkeiten von Servicerobotern verbessern und das unter dem besonderen Aspekt der funktionalen Sicherheit bzw. »Safety«. Fördermittel erhielt das Projekt vom Bundesministerium für Bildung und Forschung.
Sicheres Erkennen und Greifen
Die Weiterentwicklung entsprechender Softwaretechnologien für die Umgebungserfassung, das sichere Greifen von Gegenständen und deren Integration auf dem Serviceroboter »Care-O-bot® 4« waren der Schwerpunkt der Arbeiten am Fraunhofer IPA. Auf dem Roboter kam hierfür eine Kombination aus Radarsensor und Kameras zum Einsatz. Der Radarsensor ermöglicht dem Roboter, Personen sicher zu erkennen. Die Kameradaten werden mit maschinellen Lernverfahren ausgewertet, um zu erfassen, was eine erkannte Person gerade tut. Indem anhand der Gelenkstellungen die Körperhaltung ermittelt wird, kann die Software Aktionen wie Gehen oder Greifen zuordnen. Dies ermöglicht dem Serviceroboter, sein Verhalten so an sein menschliches Gegenüber anzupassen, dass alles sicher abläuft.
Weiterhin verbesserten die IPA-Forscher das Verständnis des Roboters für seine Umgebung. Bisherige Algorithmen haben mit handelsüblichen 3D-Kameras Probleme, transparente Objekte im Raum zu identifizieren und zu lokalisieren. Die neu entwickelten Algorithmen sind nun dazu in der Lage. Neuronale Netze helfen dem Roboter, beispielsweise Wasserflaschen besser zu detektieren und ihre genaue Pose zu ermitteln. Grundlage hierfür war ein Testszenario, in dem der Roboter in einem Pflegeheim leere Wasserflaschen gegen volle austauscht. Auf Anweisung fährt der Roboter in ein gewünschtes Bewohnerzimmer, erkennt dort die gesuchte Flasche, greift sie und bringt sie in die Küche des Wohnbereichs. Dank eines weiterentwickelten Umgebungsmodells »weiß« der Roboter, wo Tische sind, sodass er gezielt nach Flaschen in den Bewohnerzimmern suchen kann.
Das sichere Greifen wurde ebenfalls im Projekt weiterentwickelt. IPA-Experten haben hierfür eine Software entwickelt, mit der sich Armbewegungen dynamisch an die erfassten Umgebungsdaten anpassen, um Hindernisse zu vermeiden. Wenn also beispielsweise eine Pflegeheimbewohnerin spontan zum Glas greift, während der Roboter die danebenstehende Wasserflasche aufnehmen will, plant er seine Bewegung schnell um.
Praxistests im Pflegeheim
Das oben beschriebene Testszenario mit allen genannten Technologien erprobten die IPA-Forscher in einem Pflegeheim der Bruderhaus Diakonie. Zu diesem Zweck erhielt Care-O-bot® 4 neue Arme speziell für den kollaborativen Einsatz. Sie sind besonders gepolstert und könnten bei Berührung automatisch stoppen. Eine neue dreh- und kippbare Kopfeinheit sorgt für einen sicheren Rundumblick. Der Roboter war bei den Tests für zwei Wochen im Einsatz, holte mehrfach Getränkeflaschen aus den Bewohnerzimmern und brachte sie zur Stationsküche. Dort füllte das Personal sie auf und der Roboter brachte die vollen Flaschen wieder zurück. »Die Praxistests sind extrem wertvoll für uns,« erklärt Florenz Graf, wissenschaftlicher Mitarbeiter am Fraunhofer IPA und verantwortlich für die Tests. »Wir erfahren hier Dinge, die unter Laborbedingungen keine Rolle spielen, aber für den tatsächlichen Einsatz sehr wichtig sind.«
Im Rahmen der Tests evaluierten die IPA-Forscher die einzelnen technischen Komponenten unter anderem hinsichtlich ihrer Zuverlässigkeit. Die neu entwickelten Hardware- und Softwaremodule spielten in realer Umgebung gut zusammen. Eine detaillierte statistische Auswertung zeigt, dass die verschiedenen Softwaremodule und die damit verknüpften Funktionen des Roboters bereits sehr zuverlässig sind. Der Roboter fand sich in den teilweise verwinkelten Gängen der Pflegeeinrichtung gut zurecht. Wenn ihm eine Person entgegenkam, wartete er bei Bedarf mit sicherem Abstand. Er erkannte die Getränkeflaschen in den meisten Fällen zuverlässig und griff sie dann kollisionsfrei. Eine Schwierigkeit konnte beobachtet werden, wenn man die Flaschen mit gekühltem Wasser nachfüllte. Dabei bildete sich Kondenswasser, sodass der Greifer die Flasche nicht mehr halten konnte. Teilweise mussten Testläufe auch deshalb abgebrochen werden, weil es sonst zu einer Behinderung des Personals gekommen wäre, beispielsweise, wenn der Roboter enge Gänge blockierte.
Befragung der Pflegekräfte
Neben der technischen Auswertung führten die IPA-Forscher auch eine Befragung der Pflegekräfte durch, um die praktischen Mehrwerte und Verbesserungsbedarfe des Robotereinsatzes zu ermitteln. Die Pflegekräfte nahmen den Roboter als sicher wahr und hatten keine Angst vor ihm. Allerdings wünschten sie sich, dass der Roboter seine Aufgaben schneller erledigt. Für einen langfristigen Einsatz sollte der Roboter umfassendere Interaktionsfähigkeiten mit sich bringen, bspw. indem er mittels Mimik oder Sprache Rückmeldungen zu seinem aktuellen Zustand und geplanten Aktivitäten gibt. Zudem wünschen sich die Pflegekräfte, dass der Roboter kleiner und wendiger wird.
Wegweisendes Projekt
»Dieses Projekt war für uns von großer Bedeutung. Wir konnten nahezu alle unsere Fähigkeiten und Technologien, die wir in der Gruppe »Haushalts- und Assistenzrobotik« entwickelt haben, zusammenbringen. Die Projektarbeit hat sowohl die einzelnen Komponenten wie auch das Anwendungsszenario als Ganzes – insbesondere unter dem Aspekt der Safety – erheblich vorangebracht«, bilanziert Graf. Die beschriebenen Softwarekomponenten stehen nach Projektende für neue Anwendungen oder kundenspezifische Weiterentwicklungen zur Verfügung.
Wissenschaftliche Ansprechpartner:
Florenz Graf, Tel. 0711 970-1286, florenz.graf@ipa.fraunhofer.de
Weitere Informationen:
Media Contact
Alle Nachrichten aus der Kategorie: Maschinenbau
Der Maschinenbau ist einer der führenden Industriezweige Deutschlands. Im Maschinenbau haben sich inzwischen eigenständige Studiengänge wie Produktion und Logistik, Verfahrenstechnik, Fahrzeugtechnik, Fertigungstechnik, Luft- und Raumfahrttechnik und andere etabliert.
Der innovations-report bietet Ihnen interessante Berichte und Artikel, unter anderem zu den Teilbereichen: Automatisierungstechnik, Bewegungstechnik, Antriebstechnik, Energietechnik, Fördertechnik, Kunststofftechnik, Leichtbau, Lagertechnik, Messtechnik, Werkzeugmaschinen, Regelungs- und Steuertechnik.




Neueste Beiträge

Ideen für die Zukunft
TU Berlin präsentiert sich vom 22. bis 26. April 2024 mit neun Projekten auf der Hannover Messe 2024. Die HANNOVER MESSE gilt als die Weltleitmesse der Industrie. Ihr diesjähriger Schwerpunkt…
Peptide auf interstellarem Eis
Dass einfache Peptide auf kosmischen Staubkörnern entstehen können, wurde vom Forschungsteam um Dr. Serge Krasnokutski vom Astrophysikalischen Labor des Max-Planck-Instituts für Astronomie an der Universität Jena bereits gezeigt. Bisher ging…
Wasserstoff-Produktion in der heimischen Garage
Forschungsteam der Frankfurt UAS entwickelt Prototyp für Privathaushalte: Förderzusage vom Land Hessen für 2. Projektphase. Wasserstoff als Energieträger der Zukunft ist nicht frei verfügbar, sondern muss aufwendig hergestellt werden. Das…

