Verhaltenshinweise machen Roboter zu besseren Verfolgern
Forscher an der University of California in Davis (UCD) haben ein System entwickelt, mit dem Roboter einander besser verfolgen können. Der Verfolger nutzt dabei drahtlos gesendete Hinweise um zu erkennen, ob der führende Roboter um eine Ecke biegen wird und kann auch bei Verlust des Blickkontakts leicht folgen.
„Diese Folge-Problematik ist ein fundamentales Problem in der Robotik“, erklärt Sanjay Joshi, Professor an der UCD. Langfristig könnten sich Roboter dank der Entwicklung auch Menschen besser auf die Fersen heften. Denn Personen zeigen durch offene Signale und versteckte Verhaltenshinweise an, wie sie sich fortbewegen werden. Genau das sollen die Roboter ausnützen.
Verhaltensstudien haben beispielsweise gezeigt, dass gehende Menschen unbewusst ihren Kopf etwas zur Seite drehen, bevor sie links oder rechts abbiegen. Solche und andere Verhaltenshinweise könnte ein Roboter nutzen. Sie helfen ihm zu beurteilen, wie er sich bewegen muss, um dem Menschen zu folgen. Beispielsweise beim Umrunden von Gebäudeecken und in anderen Situationen, in denen der Roboter sein Ziel kurzzeitig aus dem Auge verliert, verspricht das Vorteile. „Wenn wir diese Hinweise in Kontrollsysteme einbinden können, wird das Folgen zuverlässiger“, glaubt Joshi. Mit solchen Robotern könnten Menschen leichter zusammenarbeiten. Beispielsweise könnte ein Spitalsroboter einem Arzt durch die einzelnen Abteilungen folgen. Daher arbeitet das Forscherteam an einem System, mit dem Roboter beispielsweise per Kamera aufgefangene Hinweise zur besseren Bestimmung ihrer weiteren Bewegung nutzen können.
Getestet haben die Forscher das System mit kommerziell erhältlichen „Scorpion“-Robotern der Firma Evolution Robotics, die einander gefolgt sind.
Verhaltenshinweise, dass der führende Roboter bald links oder rechts abbiegen könnte, wurden dabei nicht direkt beobachtet. Stattdessen hat der Führer per drahtlosem Signal Hinweise an den Verfolger übertragen. Dieser konnte die Hinweise zusätzlich zur aktuellen Geschwindigkeit und Bewegungsrichtung des führenden Roboters nutzen, um über seine eigene weitere Bewegung zu entscheiden.
Das Experiment hat die Hoffnungen der Forscher bestätigt. Der Verfolger konnte dem Führer deutlich besser folgen, wenn er die zusätzlichen Hinweise bei der Kursberechnung berücksichtigte, insbesondere, wenn um Ecken gebogen wurde.
Media Contact
Alle Nachrichten aus der Kategorie: Interdisziplinäre Forschung
Aktuelle Meldungen und Entwicklungen aus fächer- und disziplinenübergreifender Forschung.
Der innovations-report bietet Ihnen hierzu interessante Berichte und Artikel, unter anderem zu den Teilbereichen: Mikrosystemforschung, Emotionsforschung, Zukunftsforschung und Stratosphärenforschung.




Neueste Beiträge

Merkmale des Untergrunds unter dem Thwaites-Gletscher enthüllt
Ein Forschungsteam hat felsige Berge und glattes Terrain unter dem Thwaites-Gletscher in der Westantarktis entdeckt – dem breiteste Gletscher der Erde, der halb so groß wie Deutschland und über 1000…

Wasserabweisende Fasern ohne PFAS
Endlich umweltfreundlich… Regenjacken, Badehosen oder Polsterstoffe: Textilien mit wasserabweisenden Eigenschaften benötigen eine chemische Imprägnierung. Fluor-haltige PFAS-Chemikalien sind zwar wirkungsvoll, schaden aber der Gesundheit und reichern sich in der Umwelt an….
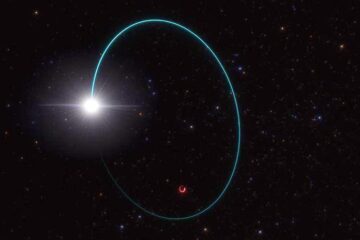
Das massereichste stellare schwarze Loch unserer Galaxie entdeckt
Astronominnen und Astronomen haben das massereichste stellare schwarze Loch identifiziert, das bisher in der Milchstraßengalaxie entdeckt wurde. Entdeckt wurde das schwarze Loch in den Daten der Gaia-Mission der Europäischen Weltraumorganisation,…

