Lernfähige Software ermöglicht Robotern geschicktes Hantieren im Weltraum und auf der Erde
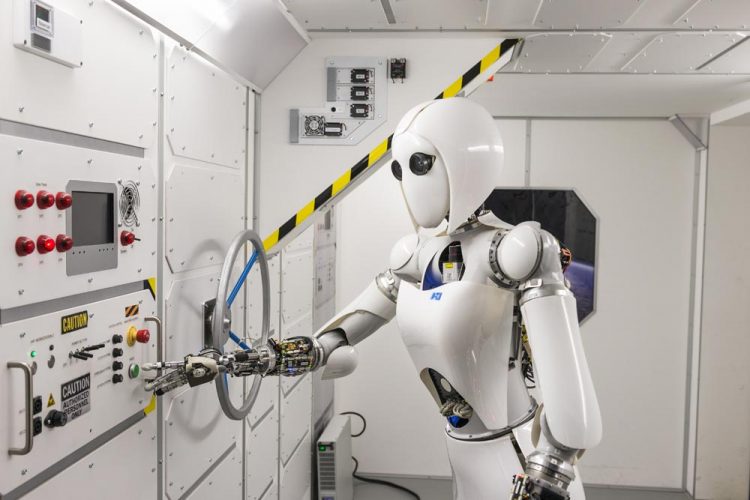
Die Roboterdame AILA führt eine autonome Manipulationsaufgabe in einem Nachbau der ISS durch Copyright: "DFKI GmbH; Foto: Jakob Weber"
Roboter werden heute in immer mehr Bereichen für zunehmend komplexere Aufgaben eingesetzt – auf fremden Planeten sollen sie etwa Infrastruktur aufbauen. Dies erfordert zugleich immer intelligentere Systeme, die an die Fähigkeiten des Menschen heranreichen. In dem am 31. Juli erfolgreich abgeschlossen Projekt BesMan („Behaviours for Mobile Manipulation“) erarbeitete das Team des DFKI und der Universität Bremen generische Steuerverfahren für die ein- und zweiarmige Manipulation.
Das Besondere: diese funktionieren unabhängig von der Gestalt des Roboters, in menschenähnlichen Systemen genauso wie in mehrbeinigen Kletterrobotern. Mit Hilfe der neuen Verfahren können Roboter nicht nur unterschiedliche Objekte manipulieren, sondern auch flexibel auf unvorhergesehene Situationen reagieren – und zwar ohne dass der Mensch eingreifen muss. Darüber hinaus entwickelten die Bremer Wissenschaftlerinnen und Wissenschaftler eine maschinelle Lernplattform, die dem System das Erlernen situationsspezifischer Verhaltensweisen ermöglicht, die es über eine Schnittstelle zum Menschen einstudiert.
Für den Einsatz auf fremden Planeten müssen Roboter nicht nur motorisch fit sein, sondern auch eigenständig und flexibel auf unvorhersehbare Situationen reagieren können. Dabei helfen die in BesMan entwickelten Steuerverfahren, die nach dem Prinzip eines Baukastens funktionieren: Eine Reihe von Verhaltensstrategien – etwa solche, die dem Roboter das Greifen oder Heben von Objekten ermöglichen – hat er bei seiner Reise ins All bereits im Gepäck.
Je nach Situation oder Aufgabe schmiedet er einen gesonderten Plan und wählt die dafür jeweils passenden Verhaltensweisen aus. Auf diese Weise kann er sich selbst aus schwierigen Situationen befreien und eigenständig neue Aufgaben meistern. Schafft er dies nicht, kommt die Lernplattform zum Einsatz: Auf der Erde macht der Mensch Bewegungen im Labor vor, die dem Roboter aus der Klemme helfen können. Sogenannte Motion-Tracking-Kameras zeichnen diese auf, woraufhin die Lernplattform den Bewegungsablauf automatisch in einzelne Segmente zerlegt.
In einer Simulation wird die Abfolge schließlich reproduziert, erlernt und an die Anforderungen des Systems angepasst, bevor sie ins All auf den Roboter übertragen wird. Dieser führt die Handlung aus und übernimmt die neue Bewegung in sein Verhaltensrepertoire.
Die lernfähige Software testeten die Wissenschaftlerinnen und Wissenschaftler an unterschiedlichen DFKI-Robotersystemen, etwa an dem nachgiebigen Roboterarm COMPI, der humanoiden Roboterdame AILA und dem sechsbeinigen Laufroboter Mantis.
Das Robotics Innovation Center des DFKI spielt heute eine Vorreiterrolle in der der Robotik: Indem es auf die Integration aller Funktionalitäten in ein hochkomplexes System setzt, gelingt es den Forschern immer intelligentere Roboter für unterschiedliche Anwendungsgebiete zu realisieren. In der Raumfahrt könnten durch den Einsatz solcher Systeme immense Kosten gespart werden, da im Vergleich zu bemannten Missionen deutlich weniger Gewicht ins All befördert werden müsste.
Das Projekt BesMan wurde mit rund 3,8 Mio. Euro von der Raumfahrt-Agentur des Deutschen Zentrums für Luft- und Raumfahrt e.V. mit Mitteln des Bundesministeriums für Wirtschaft und Technologie über eine Laufzeit von vier Jahren gefördert.
Weitere Informationen unter http://dfki.de/robotik/de/forschung/projekte/besman.html
Kontakt:
Prof. Dr. Frank Kirchner
Direktor DFKI Robotics Innovation Center
E-Mail: frank.kirchner@dfki.de
Tel.: 0421 178 45 4100
Dr.-Ing. José de Gea Fernández
Projektleiter BesMan
E-Mail: Jose.de_Gea_Fernandez@dfki.de
Tel.: 0421 178 45 4112
Pressekontakt:
Unternehmenskommunikation Bremen
E-Mail: uk-hb@dfki.de
Tel.: 0421 178 45 4180
Media Contact
Weitere Informationen:
http://www.dfki.deAlle Nachrichten aus der Kategorie: Informationstechnologie
Neuerungen und Entwicklungen auf den Gebieten der Informations- und Datenverarbeitung sowie der dafür benötigten Hardware finden Sie hier zusammengefasst.
Unter anderem erhalten Sie Informationen aus den Teilbereichen: IT-Dienstleistungen, IT-Architektur, IT-Management und Telekommunikation.




Neueste Beiträge

Neue universelle lichtbasierte Technik zur Kontrolle der Talpolarisation
Ein internationales Forscherteam berichtet in Nature über eine neue Methode, mit der zum ersten Mal die Talpolarisation in zentrosymmetrischen Bulk-Materialien auf eine nicht materialspezifische Weise erreicht wird. Diese „universelle Technik“…

Tumorzellen hebeln das Immunsystem früh aus
Neu entdeckter Mechanismus könnte Krebs-Immuntherapien deutlich verbessern. Tumore verhindern aktiv, dass sich Immunantworten durch sogenannte zytotoxische T-Zellen bilden, die den Krebs bekämpfen könnten. Wie das genau geschieht, beschreiben jetzt erstmals…

Immunzellen in den Startlöchern: „Allzeit bereit“ ist harte Arbeit
Wenn Krankheitserreger in den Körper eindringen, muss das Immunsystem sofort reagieren und eine Infektion verhindern oder eindämmen. Doch wie halten sich unsere Abwehrzellen bereit, wenn kein Angreifer in Sicht ist?…

