Abschlusspräsentation zur automatisierten Schifffahrt im Rostocker Hafen

Der Katamaran Messin – mit den Nahfeldsensoren an Bord – kam sowohl im ersten als auch im zweiten Testszenario als autonom agierendes unbemanntes Wasserfahrzeug (USV) zum Einsatz. Hochschule Wismar/Kerstin Baldauf
Die Abschlusspräsentation fand auf dem Traditionsschiff Typ Frieden des Schiffbau- und Schifffahrtsmuseums im IGA Park Rostock statt. Unmittelbar hinter dem Traditionsschiff – auf der Unterwarnow gegenüber dem Seehafen – wurden anhand von unterschiedlichen Testszenarien mit autonomen Wasserfahrzeugen die Potentiale des entwickelten, autonomen Systems demonstriert.
Zwei Schiffe waren vernetzt und agierten kooperativ. Ein drittes, nicht vernetztes bemanntes Schlauchboot störte die beiden autonomen Fahrzeuge. Sie wichen autonom sowohl untereinander als auch dem störenden Fahrzeug unter Beachtung der geltenden Kollisionsverhütungsregelung und ihrem eigentlichen Fahrziel aus.
„In einem zweiten Szenario wurde das Potential eines Nahfelderkennungssystem gezeigt, das einen Kai bei paralleler Vorbeifahrt der unbemannten Wasserfahrzeuge exakt lokalisieren kann“, so Prof. Dr.-Ing. Olaf Simanski, der das Arbeitspaket der Hochschule Wismar als Projektleiter koordinierte. Seine Arbeitsgruppe Automatisierungstechnik/ Mechatronik (ATM) hatte gemeinsam mit den Forschern des Institutes für Innovative Schiffs- Simulation und Maritime Systeme (ISSIMS) den mit insgesamt 430 Tausend Euro geförderten Projektteil zur Nahfelderkennung und der assistierten Schiffsführung bearbeitet.
Zum dritten und letzten Szenario in Warnemünde erfolgte der Transfer zahlreicher Teilnehmer der Abschlussdemonstration mit einem Fährschiff direkt vom IGA Park Rostock aus. So konnten die deutschlandweit angereisten Teilnehmer die Mobilität auf dem Wasser live erleben. „Die rasante Entwicklung der Automatisierung wird zukünftig weitere Verkehrsträger im maritimen Bereich einschließen“, erläutert Prof. Dr. Torsten Jeinsch, Projektleiter an der Universität Rostock.
Zum Abschluss der Präsentation wurde im Maritimen Simulationszentrum Warnemünde (MSCW) des Bereiches Seefahrt der Hochschule Wismar gezeigt, wie vernetzte Kooperation von Schiffen in sicherheitskritischen Bereichen simuliert werden kann. In der simulierten Fahrrinne zum Hafen Rostock begegnen sich zwei Fährschiffe mit jeweils einer Länge von 200 m.
„Die Simulation demonstrierte, wie die Schiffe gemäß der nationalen Kollisionsverhütungsregeln in der engen Fahrrinne einander ausweichen ohne sich zu behindern“, beschreibt Dr.-Ing. Michael Gluch das Geschehen auf den Brücken und im Instruktorraum des Schiffsführungssimulators (SHS – Ship Handling Simulator).
Aufbauend auf den bisherigen Ergebnissen zur assistierten Schiffsführung werden bei der weiterführenden Entwicklung eines robusten und personalisierbaren Manöver-Assistenz-Systems an der Hochschule Wismar zwei zukunftsweisende Prämissen parallel verfolgt: Einerseits das Expertenwissen der Nautiker in die digitale Welt zu transferieren und damit auch für Ausbildung und Training verfügbar zu machen.
Anderseits mit diesem Assistenzsystem, über das auch alle neuen automatisierten Funktionalitäten integriert werden, ein Instrument auf dem Weg zu höheren Automatisierungsstufen zu schaffen, das bei Systemstörungen als Diagnosewerkzeug und Rückfalllösung dienen kann.
Erst mit der genauen und zuverlässigen Bestimmung von Position, Geschwindigkeit und Orientierung ist der Grundstein für ein vernetztes, automatisiertes System gelegt. „Besonderes Alleinstellungsmerkmal in GALILEOnautic ist die Vernetzung und zentrale Koordination aller beteiligten maritimen Fahrzeuge. Auch wenn ein Teilnehmer nicht vernetzt ist, kann das System adäquat reagieren.“, erklärt Dr. René Zweigel von der RWTH Aachen, Koordinator des Projekts. „Dadurch ist es möglich Automatisierung auch bei Mischverkehr mit autonomen und nicht autonomen Systemen umzusetzen. Nur so kann eine Automatisierung Schritt für Schritt gelingen.“
Eine Grundvoraussetzung für autonomes Handeln stellte die hochgenaue und zuverlässige Positionsbestimmung und Navigation dar, wobei die Forscher auch auf das neue europäische Satellitennavigationssystem »Galileo« zurückgriffen. Damit berechnete, aktuelle Informationen über Position, Geschwindigkeit und Orientierung erlaubten eine Vorhersage darüber, wie sich die Schiffe in den nächsten Sekunden und Minuten weiter bewegen würden.
Mit diesem Wissen konnten optimale Handlungsvorschläge für alle Schiffe, beispielsweise in einem Hafen, in einem kooperativen Sinn ermittelt werden. Hierzu zählte auch die Weiterentwicklung bestehender Manöverassistenzsysteme. Zusätzlich wurden Schiffsregelungssysteme an Bord erstellt, die robust gegenüber sich ändernden Umweltbedingungen und Einflüssen sind. Zur Datenübertragung zwischen allen Verkehrsträgern wurden sichere und permanent verfügbare Kommunikationswege geschaffen. Für den Nahbereich wurden im Projekt außerdem Sensoren im Sinne einer Nahfelderkennung kombiniert.
In seinem Grußwort betont Professor Wiegand-Hoffmeister, Rektor der Hochschule Wismar, auch im Namen seines Amtskollegen an der Universität Rostock, Rektor Professor Wolfgang Schareck, die Wichtigkeit einer allumfassenden Zusammenarbeit von Wissenschaft, Industrie und Politik: „Das Rostocker Umfeld mit seinem Hafen, der sehr guten Infrastrukturanbindung und der Nähe zur Hochschule Wismar und der Universität Rostock ermöglichen zukünftige Schritte in Richtung autonome Schifffahrt. Hier können und wollen wir eine Vorreiterrolle einnehmen“. Er ergänzt: „Die in Rostock verfügbare Forschungsinfrastruktur bietet ideale Bedingungen, um die technischen Voraussetzungen einer zukünftigen autonomen Schifffahrt im Verbund mit allen beteiligten Partnern zu entwickeln“.
Im Projekt GALILEOnautics entwickelten die RWTH Aachen, die Universität Bremen, die Universität Rostock, die Hochschule Wismar und das IT-Unternehmen SCISYS Deutschland GmbH zusammen in einem vom Bundesministerium für Wirtschaft und Energie (BMWi) mit einem Fördervolumen von 1,6 Millionen Euro geförderten Projekt automatisierte Systeme für den maritimen Bereich.
Kontakt
Für weitere Informationen wenden Sie sich bitte direkt an
Dr.-Ing. René Zweigel
Projektleiter GALILEOnautic
Institut für Regelungstechnik
RWTH Aachen University
Telefon: +49 241 80 28034
E-Mail: r.zweigel@irt.rwth-aachen.de
Prof. Dr.-Ing. Olaf Simanski
Projektleiter an der Hochschule Wismar
Arbeitsbereich Automatisierungstechnik/Mechatronik
Telefon: 03841 753 72 60
E-Mail: olaf.simanski@hs-wismar.de
http://www.hs-wismar.de/issims – Institut für Innovative Schiffs-Simulation und Maritime Systeme
Media Contact
Alle Nachrichten aus der Kategorie: Informationstechnologie
Neuerungen und Entwicklungen auf den Gebieten der Informations- und Datenverarbeitung sowie der dafür benötigten Hardware finden Sie hier zusammengefasst.
Unter anderem erhalten Sie Informationen aus den Teilbereichen: IT-Dienstleistungen, IT-Architektur, IT-Management und Telekommunikation.




Neueste Beiträge

Neues Schweißverfahren für Windräder
… ermöglicht beschleunigte Produktion. Die Bundesanstalt für Materialforschung und -prüfung (BAM) stellt auf der diesjährigen Hannover Messe ein innovatives Schweißverfahren für Windräder vor, mit dem sich die Produktionsgeschwindigkeit von Windgiganten…

Wie Blaualgen Mikroorganismen manipulieren
Forschungsteam an der Universität Freiburg entdeckt ein bisher unbekanntes Gen, das indirekt die Photosynthese fördert. Cyanobakterien werden auch Blaualgen genannt und gelten als „Pflanzen des Ozeans“, weil sie in gigantischen…
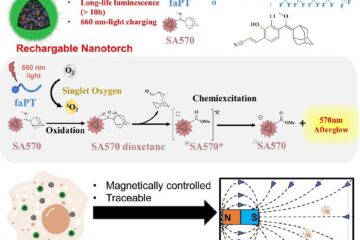
Wiederaufladbare Nanotaschenlampe
Nachleucht-Lumineszenz-Bildgebung verfolgt zellbasierte Mikroroboter in Echtzeit. Eine nachleuchtende Nanosonde eröffnet neue Perspektiven für bildgebende Verfahren in lebenden Zellen. Wie ein Forschungsteam in der Zeitschrift Angewandte Chemie berichtet, kann die neue…

