Wie Roboter laufen lernen
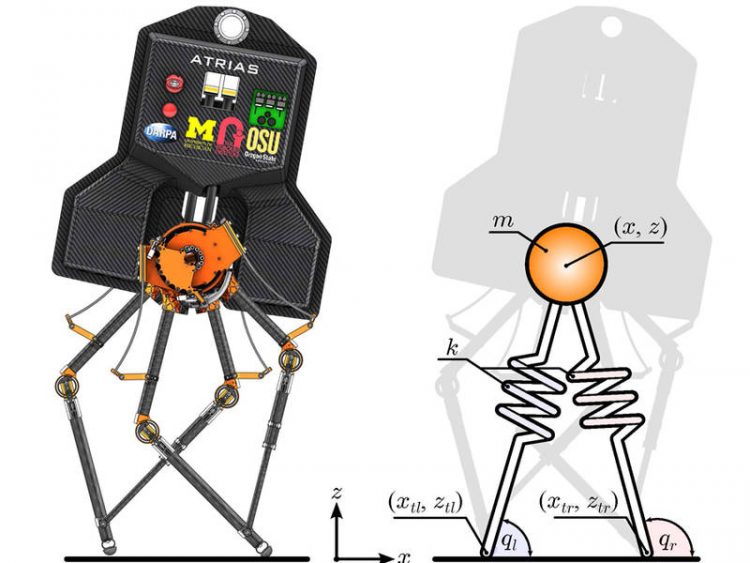
Illustration des Roboters "ATRIAS". (Bild: Mikhail Jones)
Roboter sollen dem Menschen immer ähnlicher werden. Doch gerade das Laufen auf zwei Beinen – eines der charakteristischsten Merkmale des Menschen – bereitet den Maschinen noch Probleme.
Dr. Daniel Renjewski von der TU München hat gemeinsam mit seinen Kollegen an der Oregon State University „ATRIAS“ entwickelt, ein Prototyp, der das Laufen auf zwei Beinen so gut beherrscht wie bisher noch kein Roboter. Die Ergebnisse der Studie könnten auch für die Entwicklung von besseren Prothesen eingesetzt werden.
Wenn wir laufen, achten wir nicht bewusst auf die Struktur des Bodens. Unser Körper hat die Fähigkeit, kleine Unebenheiten automatisch auszugleichen, ohne dass wir stolpern oder stehen bleiben müssen. Laufroboter wie etwa der humanoide „Asimo“ aus Japan, die dem Menschen vom Aussehen sehr ähneln, gehen im Vergleich dazu allerdings eher langsam und steif. Auch verbrauchen sie für den Vorgang sehr viel Energie.
Menschen und Tiere denken nicht über das Laufen nach, erklärt Dr. Daniel Renjewski vom Lehrstuhl für Echtzeitsysteme und Robotik an der TUM. „Die Intelligenz liegt in der Mechanik.“ Sehnen und Muskeln federn die Unebenheiten des Untergrunds ab. „Wenn wir laufen, fallen wir sozusagen von einem Schritt in den anderen“, sagt Renjewski. Das bedeutet, unser Gang ist zeitweise instabil. Würde das Laufen mitten in der Bewegung unterbrochen, wäre die Folge, dass wir hinfallen.
Bisherige Laufroboter: Stabil, aber steif
Eine solche dynamische Bewegung ist bei einem Roboter, der nach klassischen technischen Prinzipien entwickelt wurde, schwer zu steuern. Um kontrollieren zu können, dass die Maschine stets stabil ist und nicht umfällt, messen die Ingenieure daher zu jedem Zeitpunkt, wo sich der Roboter befindet und wie sein Schwerpunkt verlagert wird. Ein Preis für diese genaue Steuerung: Die Bewegungen müssen kontrolliert und steif sein. Meist laufen die Maschinen im Labor auf geradem Terrain und müssen nur definierten Hindernissen ausweichen.
Renjewski und seine Kollegen an der Oregon State University hatten das Ziel einen Roboter zu entwickeln, dessen Gangart dem des Menschen gleicht. Den zweibeinigen Roboter, über den sie im Fachblatt „IEEE Transactions on Robotics“ berichten, nannten sie „ATRIAS“ (Assume The Robot Is A Sphere, übersetzt: Angenommen, der Roboter ist eine Kugel).
Feder-Masse-Modell in Theorie und Praxis
Die Entwicklung von ATRIAS basiert auf dem sogenannten Feder-Masse-Modell, das 1989 erstmals vorgestellt wurde. Dieses Modell beschreibt das grundlegende Prinzip des Laufens auf zwei Beinen. Die gesamte Masse des Körpers ist dabei in einem Punkt gebündelt, der mit einer masselosen Feder verbunden ist. Die Feder steht dabei vereinfacht für die Muskeln, Knochen und Sehnen, auf die in der Realität die Kräfte beim Gehen wirken.
Um dieses theoretische Modell technisch umsetzen zu können, mussten die Forscher noch einige Anpassungen vornehmen. Denn in der Realität besitzt die Feder eine Masse. Auch wird die mechanische Energie im System im Gegensatz zur Theorie durch Reibung teilweise in Wärme umgewandelt und steht nicht mehr für die Bewegung des Systems zur Verfügung.
ATRIAS kann nicht aus der Ruhe bringen
Diese theoretisch fehlende mechanische Energie wird im Roboter durch Motoren zur Verfügung gestellt. ATRIAS besitzt je drei Motoren pro Bein. Zwei der Motoren wirken direkt auf die beiden Beinfedern ein. Der dritte Motor sorgt für die seitliche Stabilität des Roboters. Die Beine von ATRIAS machen nur zehn Prozent seiner Gesamtmasse aus, um so nahe wie möglich an die theoretische Masselosigkeit heranzureichen.
Versuche zeigten, dass ATRIAS dreimal so effizient läuft wie andere menschengroße zweibeinige Roboter. Auch Krafteinwirkungen von außen wie ein Stoß durch einen Ball oder holperiger Boden kann ihn nicht aus der Balance bringen. Prof. Jonathan Hurst von der Oregon State University und Initiator der Studie, ist sich sicher, dass diese Art der Fortbewegung sich in Zukunft bei den Laufrobotern durchsetzen wird. Wenn die Technologie weiter verbessert wird, könnten Roboter seiner Einschätzung nach zum Beispiel als Helfer bei der Feuerwehr eingesetzt werden.
Entwicklung besserer Prothesen
Die Forschungsergebnisse sind aber auch für Menschen von Bedeutung. Renjewski, der zum Mai diesen Jahres an die TUM wechselte, beschäftigt sich in einem nächsten Schritt mit der Übertragung der gewonnenen Erkenntnisse auf Roboter zur Gangrehabilitation und Prothesen.
Originalpublikation: Daniel Renjewski, Alexander Sprowitz, Andrew Peekema, Mikhail Jones, Jonathan Hurst: „Exciting Engineered Passive Dynamics in a Bipedal Robot“, IEEE Transactions on Robotics, Volume 31, Issue 5;
DOI: 10.1109/TRO.2015.2473456
Die Arbeit wurde gefördert von der National Science Foundation, der Defense Advanced Research Projects Agency und dem Human Frontier Science Program.
Multimedia:
Kontakt:
Dr. Daniel Renjewski
Technische Universität München
Lehrstuhl für Echtzeitsysteme und Robotik (Prof. Alois Knoll)
+49 (0)89 289 18133
daniel.renjewski@tum.de
Prof. Jonathan Hurst
Oregon State University
Associate Professor of Mechanical Engineering
+1-541-737-7010
jonathan.hurst@oregonstate.edu
https://flic.kr/p/s6hFdj Foto zum Download (Flickr)
https://www.youtube.com/watch?v=dl7KUUVHC-M Video auf Youtube
http://www.tum.de/die-tum/aktuelles/pressemitteilungen/kurz/article/32711/ Meldung auf der TUM-Webseite
Media Contact
Weitere Informationen:
http://www.tum.de/die-tum/aktuelles/pressemitteilungen/kurz/article/32711/Alle Nachrichten aus der Kategorie: Informationstechnologie
Neuerungen und Entwicklungen auf den Gebieten der Informations- und Datenverarbeitung sowie der dafür benötigten Hardware finden Sie hier zusammengefasst.
Unter anderem erhalten Sie Informationen aus den Teilbereichen: IT-Dienstleistungen, IT-Architektur, IT-Management und Telekommunikation.




Neueste Beiträge

Neue universelle lichtbasierte Technik zur Kontrolle der Talpolarisation
Ein internationales Forscherteam berichtet in Nature über eine neue Methode, mit der zum ersten Mal die Talpolarisation in zentrosymmetrischen Bulk-Materialien auf eine nicht materialspezifische Weise erreicht wird. Diese „universelle Technik“…

Tumorzellen hebeln das Immunsystem früh aus
Neu entdeckter Mechanismus könnte Krebs-Immuntherapien deutlich verbessern. Tumore verhindern aktiv, dass sich Immunantworten durch sogenannte zytotoxische T-Zellen bilden, die den Krebs bekämpfen könnten. Wie das genau geschieht, beschreiben jetzt erstmals…

Immunzellen in den Startlöchern: „Allzeit bereit“ ist harte Arbeit
Wenn Krankheitserreger in den Körper eindringen, muss das Immunsystem sofort reagieren und eine Infektion verhindern oder eindämmen. Doch wie halten sich unsere Abwehrzellen bereit, wenn kein Angreifer in Sicht ist?…

