Hannover Messe 2016: Unterwasserfahrzeuge vom Fließband

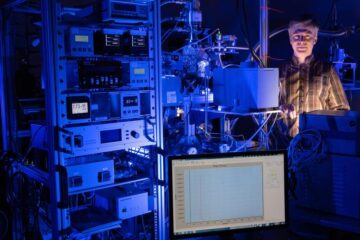
© Foto Fraunhofer IOSB-AST Das Unterwasserfahrzeug über der Forschungsplattform Maritime Systeme mit Schwenkkran, Portalsystem und Druckkammer im Hintergrund links.
Der Mensch drängt in die Tiefsee wie nie zuvor: In vielen Tausend Metern Tiefe suchen Ölfirmen nach neuen Lagerstätten und Rohstoffkonzerne nach wertvollen Mineralien, die man künftig durch Meeresbergbau gewinnen will.
Hinzu kommen Tausende Kilometer Pipelines und Unterwasserkabel, die gewartet werden müssen. Und nicht zuletzt wünschen sich auch Naturwissenschaftler robuste Geräte, mit denen sie den Meeresboden großflächig scannen können. Damit steigt der Bedarf an Unterwasserfahrzeugen für die Erkundung der Tiefsee.
Forscher des Fraunhofer-Instituts für Optronik, Systemtechnik und Bildauswertung IOSB in Ilmenau und Karlsruhe haben deshalb ein leistungsfähiges autonomes Unterwasserfahrzeug entwickelt, das in großer Stückzahl gebaut werden soll. Solche autonomen Unterwasserfahrzeuge (englischer Begriff: Autonomous Underwater Vehicles, kurz AUV) setzen Unternehmen bereits seit mehreren Jahren für die Meereserkundung ein.
Sie gleiten kabellos und selbstständig durch die Tiefe, sammeln Beobachtungsdaten und kehren von allein zum Forschungsschiff zurück. In der Regel handelt es sich dabei um teure Einzelanfertigungen. Zudem sind viele dieser Gefährte kompliziert gebaut, sodass die Handhabung an Bord der Forschungsschiffe relativ mühsam ist: Mitarbeiter müssen Batterien für den Wechsel umständlich ausbauen.
Um die vielen Terabytes an Beobachtungsdaten aus dem Bordcomputer des AUV zu lesen, vergeht eine Stunde. Hinzu kommt, dass viele dieser Geräte schwer sind und nur speziell geschultes Personal sie per Schiffskran zu Wasser lassen kann.
Can-Bus-System verhindert Kabelsalat
Das AUV des IOSB, das vom 15. bis zum 17. März 2016 während der Technikmesse Oceanology International am Stand H600 in London und vom 25. bis 29. April 2016 auf der Hannover Messe (Halle 2, Stand C16/C22) präsentiert wird, überwindet alle diese Einschränkungen. Das Gefährt mit dem Namen DEDAVE (Deep Diving AUV for Exploration) erinnert ein wenig an ein Space Shuttle. Darin haben die Forscher um Projektleiter Prof. Dr. Thomas Rauschenbach Technologien verbaut, die man bei der Konstruktion von AUV bislang nicht berücksichtigt hat.
Um den bisher üblichen Kabelsalat zu vermeiden, der häufig zu Störungen führt, wurde ein CAN-BUS-System installiert, das sich heute in jedem Auto befindet. Dabei handelt es sich um eine schlanke Kabelleitung, an die sich sämtliche Steuergeräte und Elektromotoren koppeln lassen. »Viele Experten, die uns besuchen, sind erstaunt, wie aufgeräumt es im DEDAVE aussieht«, sagt Thomas Rauschenbach.
Die Vorteile: Durch die geringe Zahl an Kabeln und Anschlüssen werden Defekte vermieden. Zudem lassen sich an den standardisierten CAN-BUS schnell und einfach neue Module, Sensoren oder Prüfgeräte für Tests koppeln. Batterien und Datenspeicher sind mit einem robusten aber einfachen Klappmechanismus befestigt und mit wenigen Handgriffen austauschbar. Das mühsame Herunterladen von Daten entfällt.
Platz für vier AUV im Überseecontainer
Eine Stärke des leichten und 3,5 Meter langen Unterwasserfahrzeugs ist, dass es wenig Platz einnimmt. An Bord eines Schiffes werden AUV in Überseecontainern gelagert. Für gewöhnlich findet darin nur eines Platz. »Wir hingegen können gleich vier unterbringen«, sagt Rauschenbach. »Das hat den Vorteil, dass man mit vier Geräten in sehr viel kürzerer Zeit größere Meeresgebiete erkunden kann als üblich.« Trotzdem bleibt viel Platz für die Zuladung. Die Ladebucht ist etwa einen Meter lang und bietet gleich mehreren Sensoren für die Erkundung des Meeresbodens Platz.
Das Unterwasserfahrzeug wird mit acht Batterien betrieben, die je 15 Kilogramm wiegen. Dank eines Schnellverschlusses lassen sich diese mit wenigen Handgriffen auswechseln. Eine Batterieladung reicht für bis zu 20 Stunden Fahrzeit.
Die Software für das ausgeklügelte Batteriemanagement wurde eigens am Fraunhofer-Institut für Silziumtechnologie ISIT in Itzehoe entwickelt. In den kommenden Wochen wird DEDAVE in Zusammenarbeit mit dem GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel und mit einer spanischen Forschungseinrichtung vor Gran Canaria in der Tiefsee getestet.
Media Contact
Alle Nachrichten aus der Kategorie: HANNOVER MESSE

_670874-85x60.jpg)


Neueste Beiträge

Ideen für die Zukunft
TU Berlin präsentiert sich vom 22. bis 26. April 2024 mit neun Projekten auf der Hannover Messe 2024. Die HANNOVER MESSE gilt als die Weltleitmesse der Industrie. Ihr diesjähriger Schwerpunkt…
Peptide auf interstellarem Eis
Dass einfache Peptide auf kosmischen Staubkörnern entstehen können, wurde vom Forschungsteam um Dr. Serge Krasnokutski vom Astrophysikalischen Labor des Max-Planck-Instituts für Astronomie an der Universität Jena bereits gezeigt. Bisher ging…
Wasserstoff-Produktion in der heimischen Garage
Forschungsteam der Frankfurt UAS entwickelt Prototyp für Privathaushalte: Förderzusage vom Land Hessen für 2. Projektphase. Wasserstoff als Energieträger der Zukunft ist nicht frei verfügbar, sondern muss aufwendig hergestellt werden. Das…

