Koordinierte mobile Manipulation – Feinmotorik für elektronische Butler und Industrieroboter
Zum Öffnen einer Tür ist es zum Beispiel notwendig, mehrere über verschiedenen Rechner verteilte Regler präzise zu synchronisieren. Nur so kann die erforderliche Bahngenauigkeit erreicht und Schäden an Roboter und Einrichtung vermieden werden.
Sie balancieren ein Tablett mit zwölf Gläsern zwischen vollbesetzten Tischen in einem überfüllten Lokal. Mit der Zehenspitze wird die schwere Eingangstür aufgeschoben, wenn es zu den Sitzplätzen im Freien geht. Der Job eines Kellners erfordert Balance und eine gesunde Motorik. Ähnliche Aufgaben sollen in Zukunft auch von Robotern übernommen werden.
„Na ja, sicherlich nicht in überfüllten Bars und Kneipen! Aber auch im industriellen Umfeld und zu Hause gibt es Aufgaben, die exakt koordinierte Bewegungen erfordern“, sagt Ulrich Reiser, Leiter des Care-O-bot®-3-Projekts am Fraunhofer IPA in Stuttgart.
Care-O-bot® 3, das ist die Vision eines Serviceroboters, einer Maschine, die uns zu Hause lästige oder beschwerliche Arbeiten abnehmen kann. Am Fraunhofer IPA beschäftigen sich Wissenschaftler mit diesem Thema bereits seit über zehn Jahren. Dabei geht es insbesondere um die Übernahme unbeliebter, eintöniger und beschwerlicher Tätigkeiten. „Der heruntergefallene Schlüsselbund, das Ausräumen der Spülmaschine oder das Servieren eines Getränks, das sind die Aufgaben, auf die wir uns derzeit konzentrieren“, erklärt Reiser.
Was zunächst trivial klingt, stellt für einen Roboter mitunter eine nicht unerhebliche Herausforderung dar. Müssen doch für das Öffnen der Spülmaschine oder einer Tür die Bewegungen von Hand, Arm und Fahrwerk präzise koordiniert werden, um weder Roboter noch Einrichtung zu beschädigen. Während der Arm des Menschen mit Muskeln und Sehnen vergleichsweise nachgiebig ist, haben die präzisen Roboterbewegungen nicht so viel „Spiel“. Schon bei kleinen Ungenauigkeiten wie etwa einer verklemmten Küchenschublade können in den meist metallenen Roboterarmen durch Verspannungen hohe Kräfte auftreten. Beim Care- O-bot® 3 sind es 27 Motoren, die synchron angesteuert werden müssen, um diese Probleme zu vermeiden.
Nachdem Care-O-bot® 3 seine Fähigkeit als interaktiver Butler bereits unter Beweis gestellt hat, haben sich die Forscher des Fraunhofer IPA in den letzten Monaten diesem Problem der synchronen mobilen Manipulation am Beispiel einer koordinierten Türdurchfahrt gewidmet. Dabei sind diese Arbeiten nicht nur für den Serviceroboter-Einsatz im häuslichen Umfeld relevant. „Im Wesentlichen geht es um eine praktisch unbegrenzte Erweiterung des Arbeitsraums von Industrierobotern“, erklärt Alexander Bubeck, der am Fraunhofer IPA für das Thema der mobilen Manipulation zuständig ist. „Stellen Sie sich vor, Sie wollen Brückenteile oder Elemente von Windkraftanlagen verschweißen. Dann stoßen Sie mit herkömmlichen Robotern sehr schnell an Grenzen. Die Roboterarme haben eben nur eine gewisse Reichweite. Kann man Arm und mobile Basis synchron bewegen, sind prinzipiell dutzende Meter lange, präzise Schweißnähte möglich.“
Dazu haben die Wissenschaftler ein echtzeitfähiges Kommunikationsnetz zwischen mehreren verteilten Reglern realisiert. Im Millisekunden-Takt senden sich die Rechner Zustandsinformationen zu, gleichen ihre gegenwärtigen Berechnungen miteinander ab und synchronisieren so die Bewegungen des gesamten Systems. Ermöglicht wird das durch den Einsatz spezieller, echtzeitfähiger Betriebssysteme und Kommunikationsroutinen. Zusätzlich erfassen eigens entwickelte Algorithmen mögliche Abweichungen, sagen deren zeitliche Entwicklung voraus und leiten notwendige Gegenmaßnahmen ein. So werden äußerst präzise Bewegungen möglich.
Die Ergebnisse dieser Entwicklungen kann man in Kürze in Stuttgart begutachten. Vom 1. bis 3. Juli öffnet das Fraunhofer IPA anlässlich seines 50-jährigen Bestehens die Pforten und präsentiert auf dem Institutsgelände die neuesten Forschungsergebnisse aus den unterschiedlichen Bereichen der Automatisierung und Produktionstechnik. Dabei wird auch Care-O-bot® 3 seine Fähigkeiten als aufmerksamer Buttler unter Beweis stellen. In einer Modellwohnung wird er Getränke an die Besucher ausschenken und sich dabei frei in mehreren Räumen bewegen.
Ihr Ansprechpartner für weitere Informationen:
Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA
Dipl.-Ing. Ulrich Reiser
Telefon: +49 711 970-1330 I ulrich.reiser@ipa.fraunhofer.de
Dipl.-Ing. Alexander Bubeck
Telefon: +49 711 970-1314 I alexander.bubeck@ipa.fraunhofer.de
Media Contact
Weitere Informationen:
http://www.ipa.fraunhofer.de/index.php?id=17Alle Nachrichten aus der Kategorie: Energie und Elektrotechnik
Dieser Fachbereich umfasst die Erzeugung, Übertragung und Umformung von Energie, die Effizienz von Energieerzeugung, Energieumwandlung, Energietransport und letztlich die Energienutzung.
Der innovations-report bietet Ihnen hierzu interessante Berichte und Artikel, unter anderem zu den Teilbereichen: Windenergie, Brennstoffzellen, Sonnenenergie, Erdwärme, Erdöl, Gas, Atomtechnik, Alternative Energie, Energieeinsparung, Fusionstechnologie, Wasserstofftechnik und Supraleittechnik.




Neueste Beiträge

Merkmale des Untergrunds unter dem Thwaites-Gletscher enthüllt
Ein Forschungsteam hat felsige Berge und glattes Terrain unter dem Thwaites-Gletscher in der Westantarktis entdeckt – dem breiteste Gletscher der Erde, der halb so groß wie Deutschland und über 1000…

Wasserabweisende Fasern ohne PFAS
Endlich umweltfreundlich… Regenjacken, Badehosen oder Polsterstoffe: Textilien mit wasserabweisenden Eigenschaften benötigen eine chemische Imprägnierung. Fluor-haltige PFAS-Chemikalien sind zwar wirkungsvoll, schaden aber der Gesundheit und reichern sich in der Umwelt an….
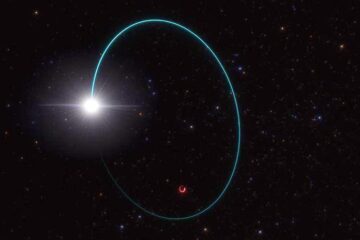
Das massereichste stellare schwarze Loch unserer Galaxie entdeckt
Astronominnen und Astronomen haben das massereichste stellare schwarze Loch identifiziert, das bisher in der Milchstraßengalaxie entdeckt wurde. Entdeckt wurde das schwarze Loch in den Daten der Gaia-Mission der Europäischen Weltraumorganisation,…

